Enoncé du principe d’inertie
Le système étudié est modélisé par un point matériel de masse \( m \). Pour la plupart des mouvements se déroulant à la surface de la Terre, on utilise le référentiel du laboratoire, ou référentiel terrestre.
Premier exemple :
Soit un objet posé sur une table horizontale. Cet objet est soumis à deux forces qui se compensent : son poids \( \overrightarrow{P} \) , vertical et dirigé vers le bas, et la réaction du support \( \overrightarrow{R} \) , verticale et dirigée vers le haut. L’objet est immobile dans le référentiel du laboratoire.
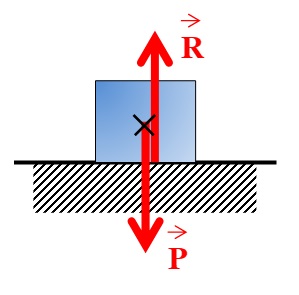
On a : \( \overrightarrow{P}+\overrightarrow{R}=\overrightarrow{0} \) ou encore : \( \overrightarrow{P}=-\overrightarrow{R} \)
On peut simplifier la représentation de la situation en modélisant l’objet (ici une boite rectangulaire) par un point matériel :
Deuxième exemple :
Soit un mobile se déplaçant sur un banc à coussin d’air, dispositif destiné à supprimer les frottements (en fait on ne peut pas supprimer les frottements, du fait de l’omniprésence de l’air, on ne fait que les réduire fortement, de façon à ce qu’on puisse les négliger pendant l’expérience). Si on lance le mobile sur le banc horizontal, il va se déplacer en M.R.U. (Mouvement Rectiligne Uniforme) dans le référentiel du laboratoire. Vous pouvez par exemple voir une vidéo de ce type de mouvement ici :
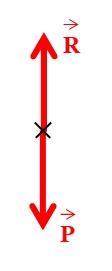
Pendant son déplacement, le mobile est soumis à deux forces qui se compensent : son poids \( \overrightarrow{P} \) , vertical et dirigé vers le bas, et la réaction du coussin d’air \( \overrightarrow{R} \) , verticale et dirigée vers le haut. Les frottements étant négligeables, il n’y a aucune autre force s’appliquant sur le mobile. L’objet est en M.R.U. dans le référentiel du laboratoire.
On peut représenter les forces s’appliquant sur le mobile, modélisé par un point, de la manière suivante :
L’étude de ces deux situations nous permet d’énoncer le principe d’inertie :
Si les forces qui s’appliquent sur un corps se compensent, alors ce corps est soit immobile, soit en mouvement rectiligne uniforme dans le référentiel utilisé.
La réciproque est vraie.
On peut aussi utiliser la contraposée du principe d’inertie :
Si, dans le référentiel utilisé, un corps n’est ni immobile, ni en mouvement rectiligne uniforme, alors les forces qui s’appliquent sur ce corps ne se compensent pas.
La réciproque est aussi vraie.
Exemples :
- Un ballon lancé en l’air décrit une trajectoire parabolique dans le référentiel terrestre : il n’est donc pas en M.R.U. On peut donc dire que les forces qui s’appliquent sur lui ne se compensent pas. Cela est normal, car si on néglige les éventuels frottements, le ballon n’est soumis qu’à une seule force, son poids.
- La Terre décrit une trajectoire quasi-circulaire autour du Soleil dans le référentiel héliocentrique : elle n’est donc pas en M.R.U. On peut donc dire que les forces qui s’appliquent sur elle ne se compensent pas. Cela est normal car la Terre n’est soumise qu’à une seule force, l’attraction gravitationnelle du Soleil (il n’y a pas de frottements dans l’espace en l’absence d’air, et on néglige l’attraction gravitationnelle des autres corps célestes).
Remarques :
- Le principe d’inertie est parfois appelé première loi de Newton.
- Dans un référentiel donné, l’immobilité peut être vue comme un cas particulier de M.R.U. (avec une vitesse nulle).
Variation du vecteur vitesse
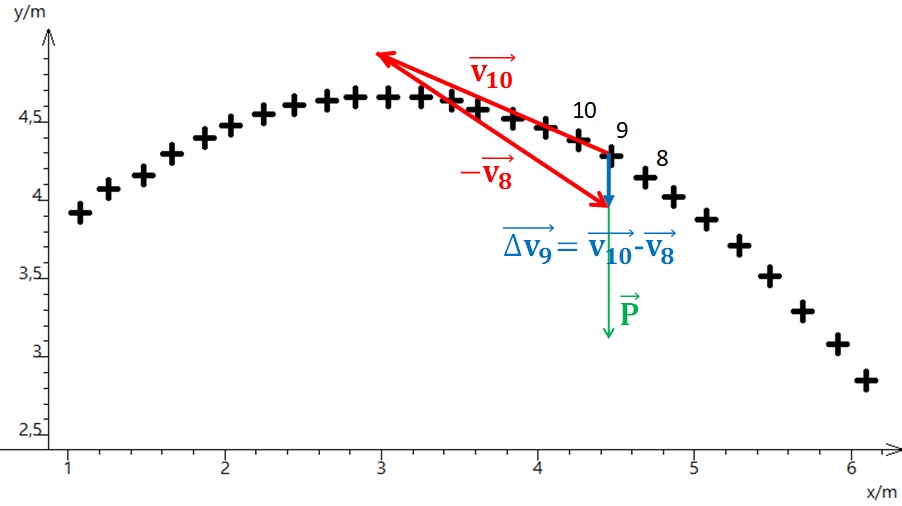
Exemple : soit un ballon de basket lancé en l’air, se déplaçant de la droite vers la gauche, dont la trajectoire est représenté ci-dessous. Si on néglige les frottements de l’air, le ballon n’est soumis qu’à son poids \( \overrightarrow{P} \), vertical et dirigé vers le bas :
On définit le vecteur variation de vitesse au point i par la relation suivante :
\[ \overrightarrow{\Delta v_{i}}=\overrightarrow{v_{i+1}}-\overrightarrow{v_{i-1}} \]
Sur le graphique, par exemple, c’est le vecteur variation de vitesse au point 9 qui a été représenté : \( \overrightarrow{\Delta v_{9}}=\overrightarrow{v_{10}}-\overrightarrow{v_{8}} \). Pour représenter ce vecteur, il faut tracer le vecteur \( \overrightarrow{v_{10}} \) en démarrant du point numéro 9. On trace ensuite \( -\overrightarrow{v_{8}} \) (c’est-à-dire un vecteur ayant la direction et la norme du vecteur \( \overrightarrow{v_{8}} \) mais allant en sens inverse) en démarrant de l’extrémité du vecteur que nous venons de tracer.
On remarque que le vecteur résultant \( \overrightarrow{\Delta v_{9}} \) est vertical et dirigé vers le bas, comme le vecteur poids \( \overrightarrow{P} \).
Si on trace le vecteur variation de vitesse en n’importe quel autre point de la trajectoire, on obtiendra le même résultat. On peut donc en déduire la loi suivante :
Si un corps est soumis à des forces qui ne se compensent pas, le vecteur variation de vitesse en tout point de sa trajectoire est un vecteur ayant même direction et même sens que la résultante des forces qui s’exercent sur ce corps.
En particulier, si un corps n’est soumis qu’à son poids, alors le vecteur variation de vitesse en tout point de sa trajectoire aura la même direction et le même sens que son poids (c’est-à-dire vertical et dirigé vers le bas).
Cette loi qualitative sera complétée plus tard. La version complète de cette loi constitue la deuxième loi de Newton.