
Vitesse et variation de vitesse
1./ Vitesse instantanée et vecteur vitesse :
Si un point matériel parcourt une distance \( d \) pendant un temps \( t \), alors sa vitesse moyenne se calcule de la façon suivante : \( v=\frac{d}{t} \) (avec : \( d \) en m, \( t \) en s et \( v \) en m·s-1).
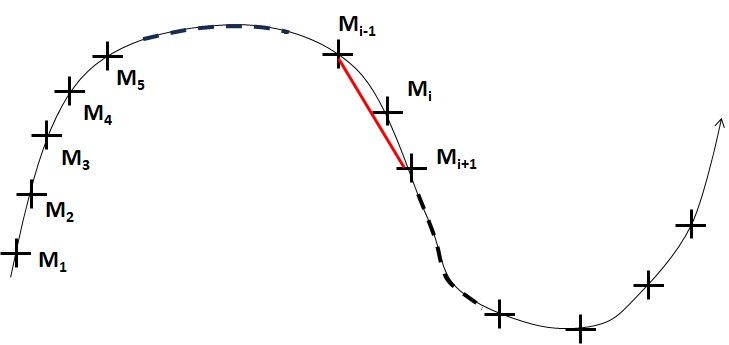
Soit un point matériel se déplaçant le long d’une certaine trajectoire. Soient \( M_{1} \), \( M_{2} \), \( M_{3} \), … les points successivement occupés par le point matériel. L'intervalle de temps nécessaire pour passer du point \( M_{i} \) au point \( M_{i+1} \) est égal à \( \Delta t \).
On définit alors la vitesse instantanée du point mobile au point \( M_{i} \) de la trajectoire de la manière suivante :
\[ v_{i}=\frac{M_{i-1}M_{i+1}}{2\times \Delta t} \]
- \( v_{i} \) : vitesse instantanée au point \( M_{i} \), exprimée en m·s-1
- \( \Delta t \) : temps séparant deux points successifs, exprimé en s
- \( M_{i-1}M_{i+1} \) : distance entre le point \( M_{i} \) et le point \( M_{i+1} \), exprimée en m (longueur du segment rouge sur le schéma précédent)
Pour tracer le vecteur vitesse au point \( M_{i} \), on trace un vecteur dont l’origine se trouve au point \( M_{i} \), la direction est parallèle au segment \( [M_{i-1}M_{i+1}] \) et le sens est celui de la trajectoire du point mobile.
On a :
\[ \overrightarrow{v_{i}}=\frac{\overrightarrow{M_{i-1}M_{i+1}}}{2\times \Delta t} \]
2./ Variation du vecteur vitesse :
On définit le vecteur variation de vitesse au point i par la relation suivante :
\[ \overrightarrow{\Delta v_{i}}=\overrightarrow{v_{i+1}}-\overrightarrow{v_{i-1}} \]
Sur ce graphique, par exemple, c’est le vecteur variation de vitesse au point 9 qui a été représenté :
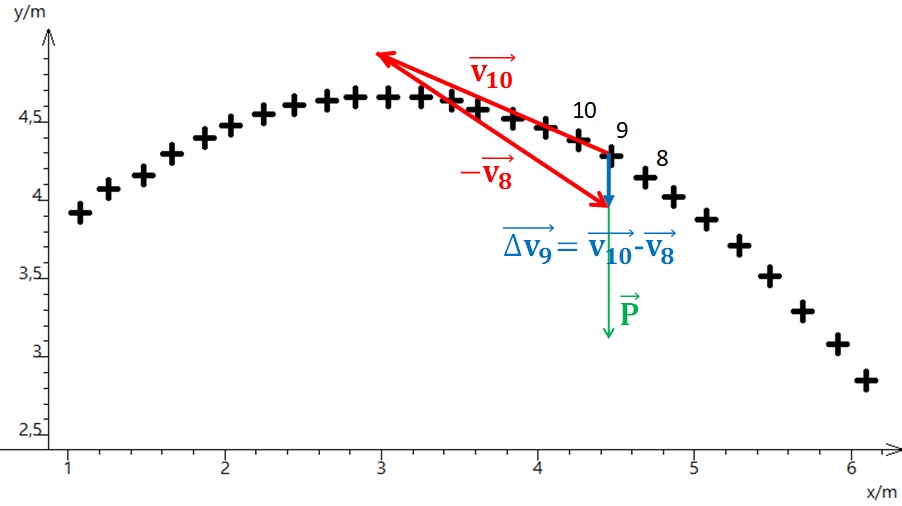
\( \overrightarrow{\Delta v_{9}}=\overrightarrow{v_{10}}-\overrightarrow{v_{8}} \). Pour représenter ce vecteur, il faut tracer le vecteur \( \overrightarrow{v_{10}} \) en démarrant du point numéro 9. On trace ensuite \( -\overrightarrow{v_{8}} \) (c’est-à-dire un vecteur ayant la direction et la norme du vecteur \( \overrightarrow{v_{8}} \) mais allant en sens inverse) en démarrant de l’extrémité du vecteur que nous venons de tracer.
On voit donc que pour tracer un vecteur variation de vitesse, il faut faire une construction graphique, sauf si on connait les coordonnées des vecteurs vitesse. Dans ce cas, si on a : \( \overrightarrow{v_{8}}\binom{v_{8x}}{v_{8y}} \) et : \( \overrightarrow{v_{10}}\binom{v_{10x}}{v_{10y}} \), alors : \( \overrightarrow{v_{9}}\binom{v_{9x}=v_{10x}-v_{8x}}{v_{9y}=v_{10y}-v_{8y}} \)
Somme des forces appliquées à un système
En règle générale, un objet est soumis à plusieurs forces que l'on peut noter \( \overrightarrow{F_{1}} \), \( \overrightarrow{F_{2}} \), \( \overrightarrow{F_{3}} \), \( \overrightarrow{F_{4}} \), etc...
Dans ce cas là, on remarque que l'objet se comporte comme s'il n'était soumis qu'à une force unique \( \overrightarrow{\sum_{}^{}F} \) telle que :
\( \overrightarrow{\sum_{}^{}F}=\overrightarrow{F_{1}}+\overrightarrow{F_{2}}+\overrightarrow{F_{3}}+\overrightarrow{F_{4}}+... \)
\( \overrightarrow{\sum_{}^{}F} \) est appelée la somme des forces, ou la résultante des forces, appliquées à l'objet.
Lorsque l'objet subit plusieurs forces dont la somme est égale au vecteur nul (c'est-à-dire si \( \overrightarrow{\sum_{}^{}F}=\overrightarrow{0} \)) alors on dit que les forces subies par l'objet se compensent.
Expression approchée de la deuxième loi de Newton
1./ Relation entre la somme des forces et le vecteur variation de vitesse :
Soit un objet de masse m soumis à une ou plusieurs forces dont la résultante est \( \overrightarrow{\sum_{}^{}F} \). Il existe une relation entre la résultante des forces et la variation de vitesse \( \overrightarrow{\Delta v} \) de cet objet pendant l'intervalle de temps \( \Delta t \) :
\( \overrightarrow{\sum_{}^{}F}=m\times \frac{\overrightarrow{\Delta v}}{\Delta t} \)
\( \sum_{}^{}F \) en N, \( m \) en kg, \( \Delta v \) en m·s-1 et \( \Delta t \) en s.
On déduit de cette équation que les vecteurs : \( \overrightarrow{\sum_{}^{}F} \) et \( \overrightarrow{\Delta v} \) ont même direction et même sens.
On peut donc écrire : \( \sum_{}^{}F=m\times \frac{\Delta v}{\Delta t} \)
Attention : ceci n'est qu'une expression approchée de la deuxième loi de Newton, dont la forme complète sera étudiée en spécialité Terminale.
2./ Retour sur le principe d'inertie :
Soit un objet soumis à plusieurs forces qui se compensent. On a donc : \( \overrightarrow{\sum_{}^{}F}=\overrightarrow{0} \).
D'après la relation précédente, on a donc : \( m\times \frac{\overrightarrow{\Delta v}}{\Delta t}=\overrightarrow{0} \) et donc : \( \overrightarrow{\Delta v}=\overrightarrow{0} \), ce qui veut donc dire que le vecteur vitesse \( \overrightarrow{v} \) est constant dans le temps : l'objet est donc en mouvement rectiligne uniforme. On retrouve donc le principe d'inertie étudié en classe de seconde.
3./ Influence de la masse :
\( \overrightarrow{\sum_{}^{}F}=m\times \frac{\overrightarrow{\Delta v}}{\Delta t} \) donc : \( \overrightarrow{\Delta v}=\frac{\Delta t}{m}\times \overrightarrow{\sum_{}^{}F} \)
On voit que pour une même somme des forces \( \overrightarrow{\sum_{}^{}F} \) appliquée à l'objet, la variation du vecteur vitesse \( \overrightarrow{\Delta v} \) sera d'autant plus faible que la masse \( m \) sera grande.
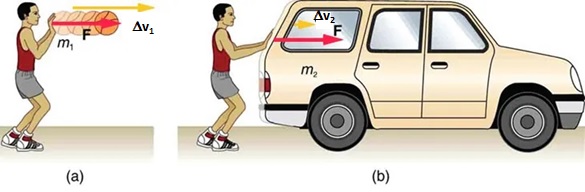
Dans les deux situations, l'intensité de la force \( F \) est la même. La variation de vitesse \( \Delta v_{1} \) du ballon sera bien plus grande que la variation de vitesse \( \Delta v_{2} \) de la voiture, car cette dernière est bien plus lourde.